
心理所研究揭示空间导航过程中情景依赖的海马-内嗅皮层协同表征机制
为了去想去的地方、做想做的事,人们需要准确地回忆起之前经历过的不同场景、物体以及其他细节。尽管这种根据环境来判断方位的能力看起来平淡无奇,但大脑究竟是如何实现这一切的,目前仍然不太清楚。
为了研究这个问题,中国科学院心理研究所的王亮研究组和北京天坛医院的张凯团队合作开展了一项研究,重点探索人类大脑中海马和内嗅皮层在认路过程中的协同工作。
该研究结合人类颅内脑电技术与情景依赖的空间导航范式,探讨了海马和内嗅中分别表征情景和物体信息的独特振荡模式。结果发现,海马和内嗅的协同表征支持空间导航行为,并且二者的局部表征和区域间信息交流都依赖于低频神经振荡。
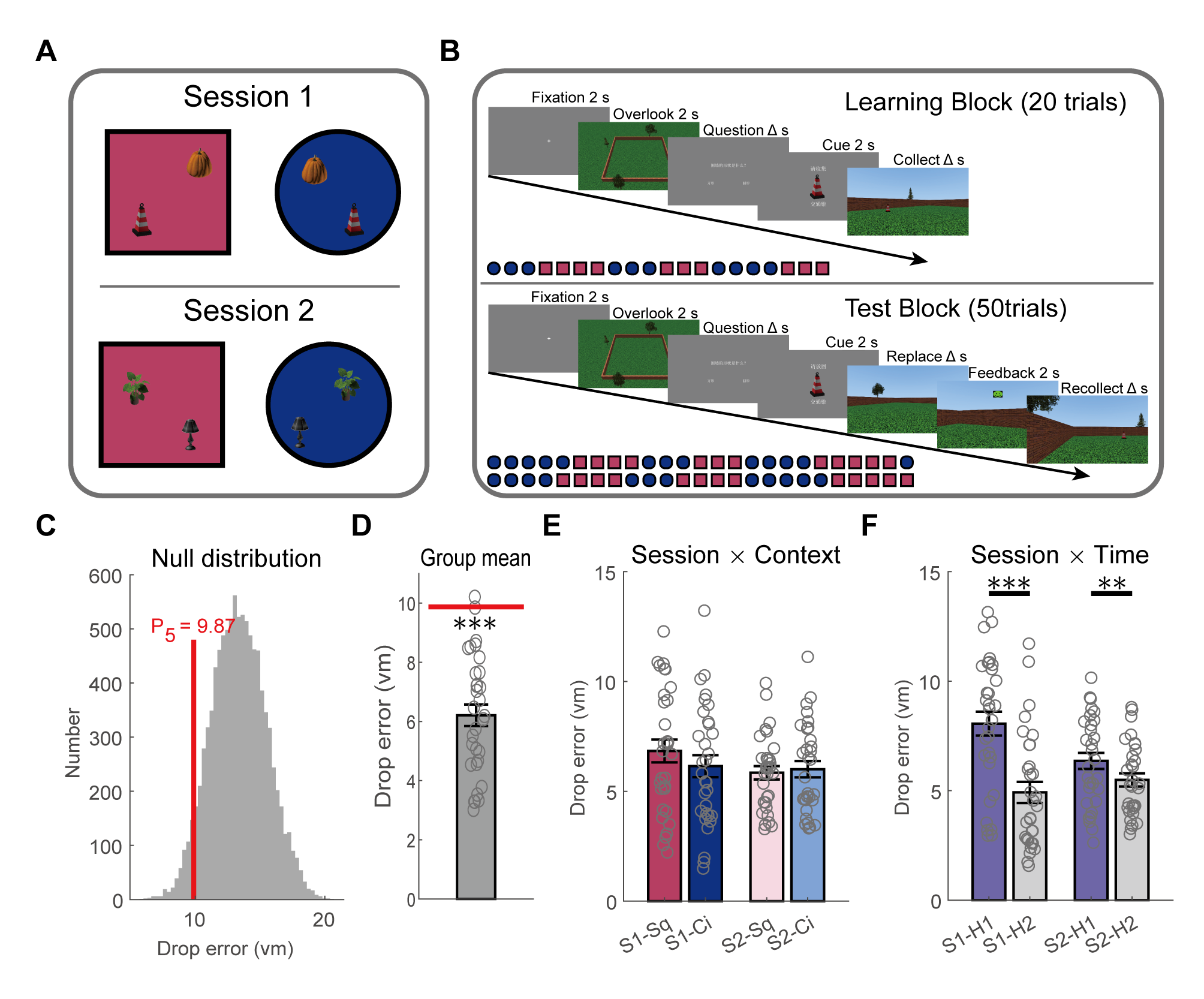
图1. 导航任务和行为结果
研究者采用情景依赖的虚拟空间导航任务(图1A),并同步监测被试完成任务时海马和内嗅的电生理活动。任务要求被试在两个场景中分别记住两个物体的位置,这两个物体在两个场景中的外观相同,但在不同场景中处于不同的位置。被试的导航行为整体较好(误差显著低于随机分布5%水平,图1C),且在两个场景间没有显著差异(图1E)。任务过程中被试表现出较强的学习效应(图1F)。
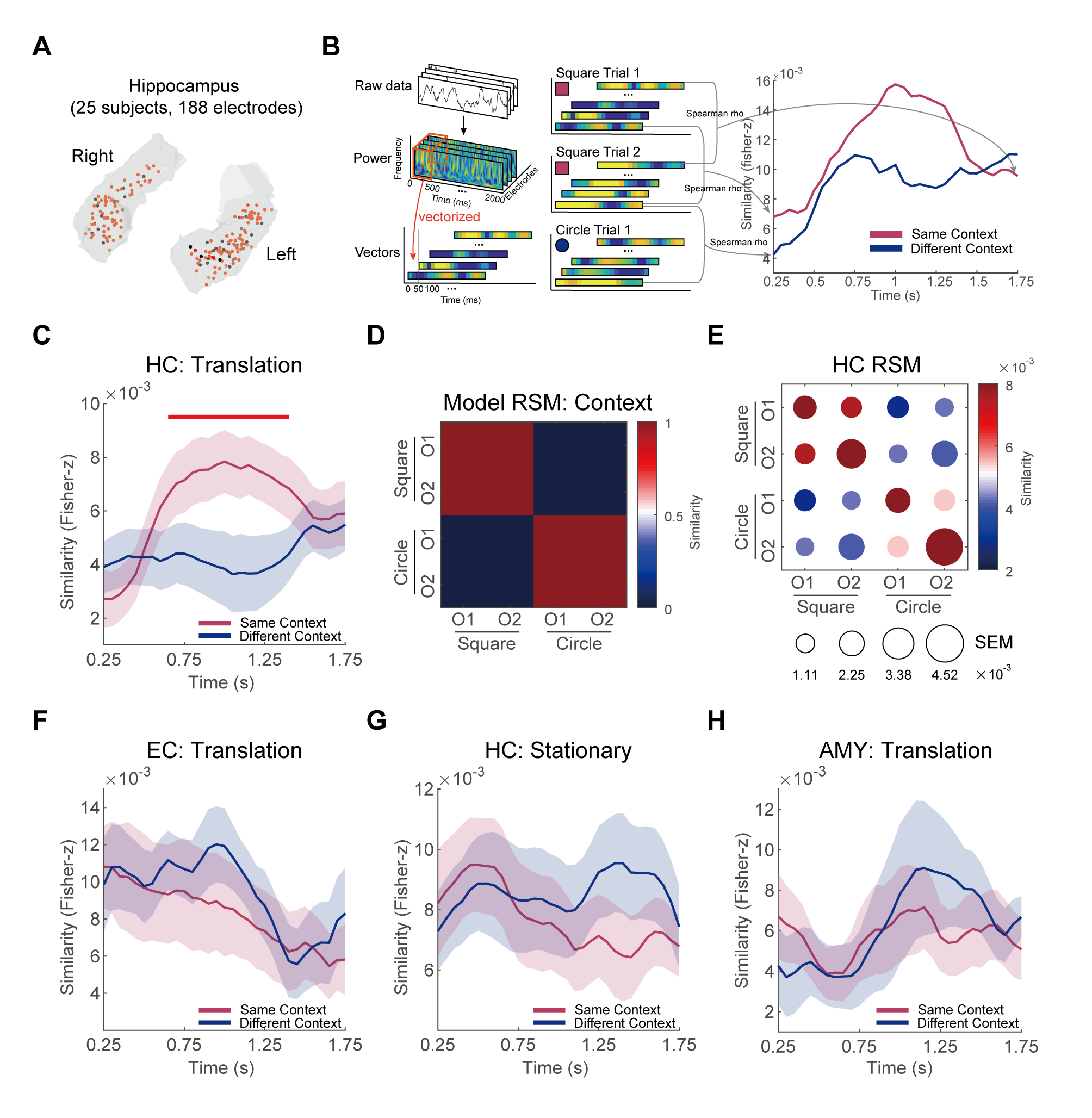
图2. 海马活动表征情景信息
通过对海马活动(图2A)的表征相似性分析(图2B)发现,在直线运动过程中海马的神经活动在相同场景的表征相似性显著高于跨场景间的相似性(图2C-E)。而在相邻的脑区—内嗅和杏仁核中都没有呈现出这种场景特异性的神经活动(图2F-H)。
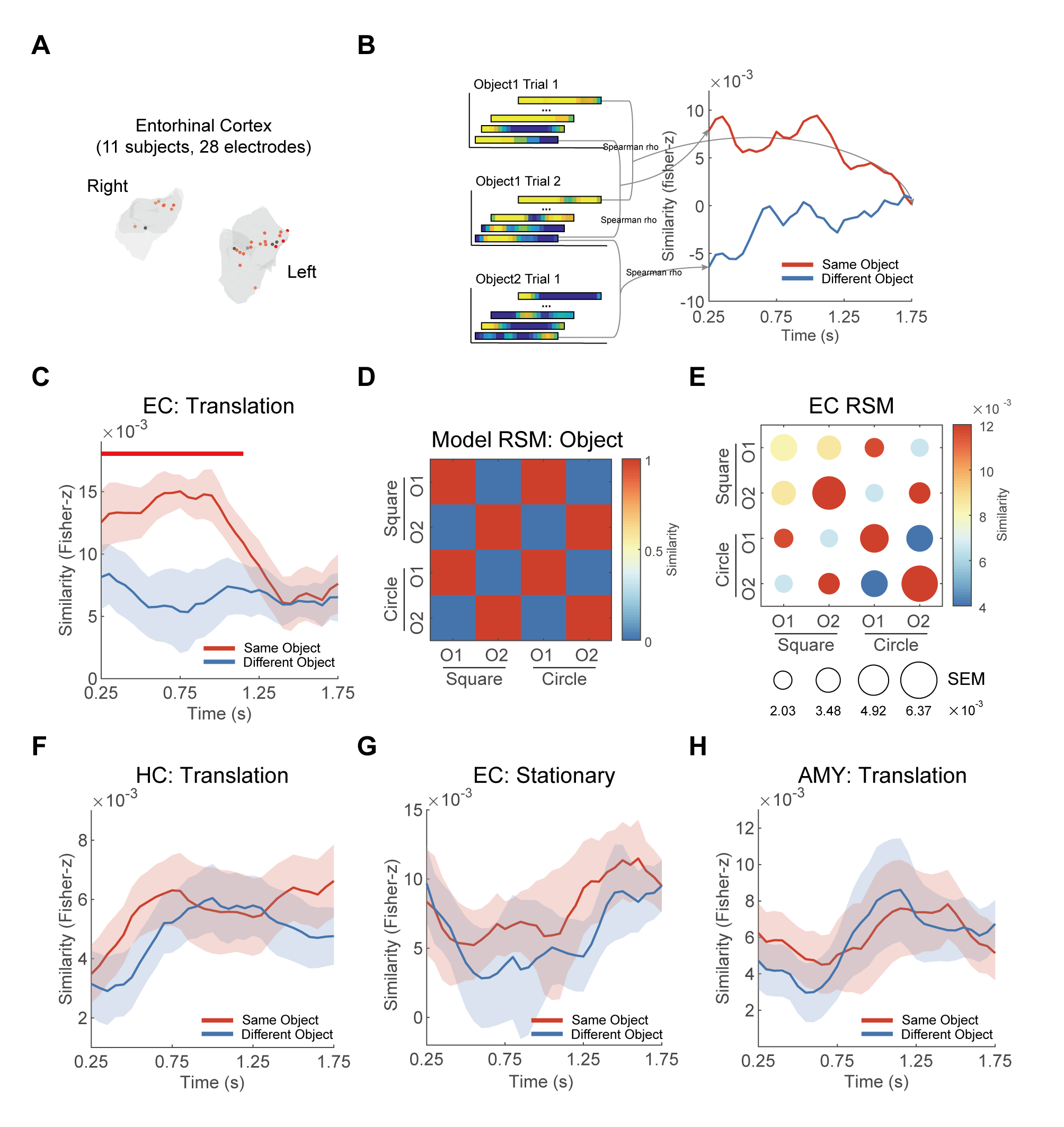
图3. 内嗅活动表征物体信息
相反,在直线运动过程中内嗅(图3A)的活动在相同物体中的相似性(图3B)显著高于不同物体间的相似性(图3C-E)。而在海马和杏仁核中都没有呈现出这种物体特异性的神经活动(图3F-H)。
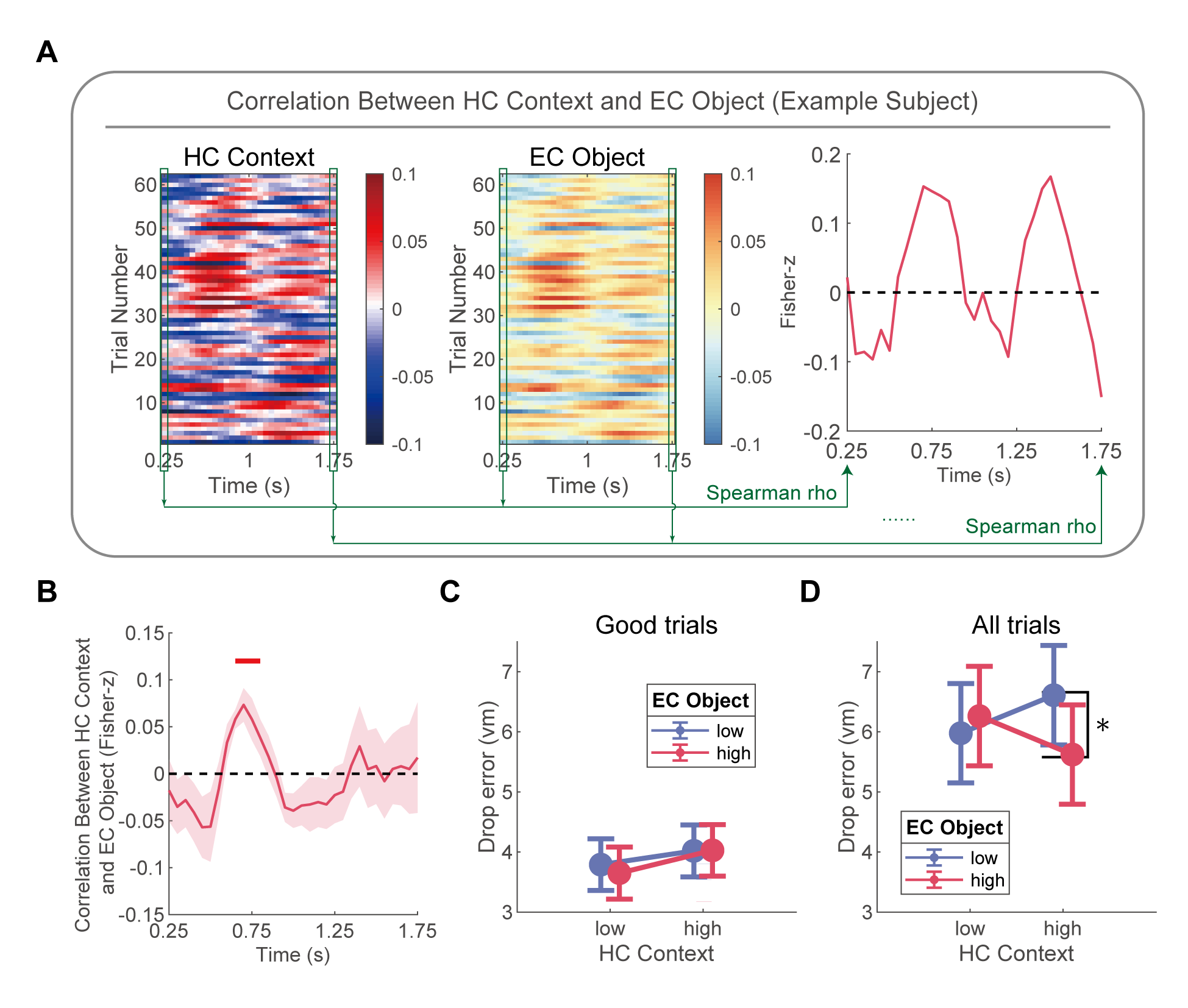
图4. 海马情景加工和内嗅物体加工的协同表征
进一步探索海马场景和内嗅物体表征之间的协同关系(图4A)发现,两者在被试内部跨试次存在显著正相关(图4B)。使用混合线性模型分析二者对行为表现的贡献发现,只有当海马的场景和内嗅的物体表征同时较强时,被试才会有较好的导航行为(图4D)。
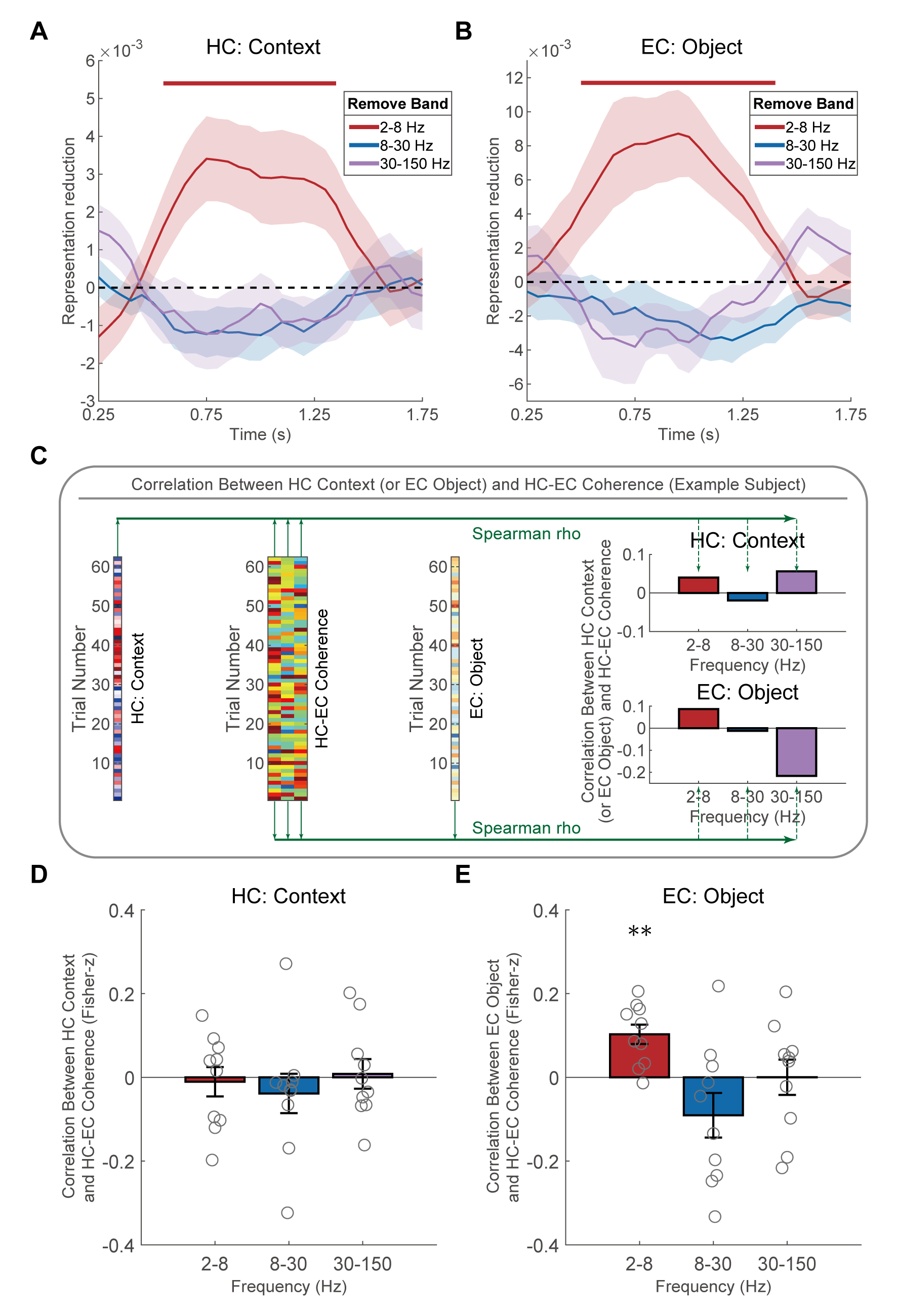
图5. 海马情景和内嗅物体表征的低频依赖性
研究通过去除不同频段神经活动,进一步探讨海马场景和内嗅物体表征与特定频段的关系,发现两种表征都依赖于低频活动(2-8 Hz,图5A-B),且海马-内嗅的功能连接和内嗅物体表征显著正相关,而与海马的场景表征无关(图5C-E)。结合二者共同对行为表现的贡献,表明海马场景与内嗅物体信息通过低频振荡进行耦合,以共同支持情景依赖的导航。
综上所述,该研究揭示了人类在场景依赖的空间导航过程中,海马和内嗅通过功能分工与低频振荡耦合的机制协同工作。具体而言,海马负责提取与当前环境相关的“情景”信息,而内嗅则处理场景中的“物体”信息。这两种信息并非独立进行,而是通过2-8 Hz的神经振荡进行有效整合,共同支撑了精准的情景依赖式导航。更重要的是,该发现为阿尔茨海默症等以空间定向障碍为首发症状的神经退行性疾病,提供了潜在的早期诊断生物学标记。
该研究获得科技创新2030-重大项目(2022ZD0205000),国家重点研发计划(2024YFF1206500)和国家自然科学基金(32020103009,32471110,32200861)等资助。
研究成果已在线发表于PLOS Biology。心理所博士研究生吕鹏程和陈栋副研究员为论文共同第一作者,心理所王亮研究员和北京天坛医院张凯主任为论文共同通讯作者。北京天坛医院张弨副主任医师、心理所博士研究生段威(已毕业)和心理所博士研究生鲁萍萍为该研究做了重要贡献。
论文信息:Lv P#, Chen D#, Zhang C, Duan W, Lu P, Zhang K*, Wang L*. (2025) Coordinated hippocampal–entorhinal representations support human context-dependent spatial navigation. PLoS Biol 23(9): e3003398.https://doi.org/10.1371/journal.pbio.3003398
附件下载: